

Esmé E Deprez and Caroline Chen from Bloomberg Businessweek visited the headquarters of Omics in India to interview its owner Srinubabu Gedela about his company. Omics is widely considered a predatory publisher that publishes papers without rigorous peer review. Confronted with the acceptance of my non-sensical paper he replied that “Bartneck’s paper slipped through because it was submitted so close to the conference’s deadline.” Yeah, right.
Author: Christoph Bartneck
Holonomic LEGO Mindstorms Robot
A holonomic robot uses omni-directional wheels to drive and turn in any direction on the spot. Agilis is an example of an early LEGO holonomic robot. My model is much simpler and robust. Essential to all holonomic robots are the use of omni-directional wheel, such as the the ones from Rotacaster. I am using a compass sensor to allow the robot to be remote controlled on an absolute grid using Connexion’s Space Navigator. This 3D input devices can be mapped to the unique movements and rotations of a holonomic robot.
Tutorial on how to install and setup JInput on Mac OS X using Eclipse
Tutorial on how to install and setup JInput on Mac OS X using Eclipse. This will enable you to use different input devices in your Java programs.
Using mouse, keyboard, joysticks and other input devices in your Java software is much easier using JInput. Unfortunately, the documentation on how to install and setup the software is short and difficult to follow. I was struggling for days getting it to work with Eclipse on Mac OS X 10.12.6. My first approach was to use Maven to install JInput. The excellent M2Eclipse plugin provides good support for Maven. Unfortunately, the pre-configured Maven Repository does not include JInput. I was unable to configure Maven/Eclipse to connect to The Central Repository to download JInput from there. Okay, I am not a fulltime Jave programmer and maybe it would become clear to me eventually. In the meantime I got it to work manually. I hope that this tutorial will help you in your project. I used Mac OS X and I cannot guarantee it will work on any other platform.
Continue reading “Tutorial on how to install and setup JInput on Mac OS X using Eclipse”
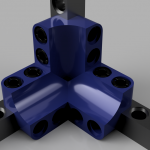
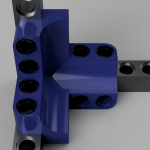
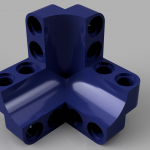
3D LEGO Technic Connector
Connecting LEGO Technic beams in three dimensions remains a difficult task. While it has become easy to connect beams in one and two dimensions, it remains difficult to extend this to the third dimension.
I first designed a new LEGO Technic connector that features pins. The design was compact and stable, put the pins were too fragile. It was also very difficult to get the support material out from the holes.
My second design had no pins but still the option to firmly hold a technic beam. With this new 3D printed corner part it is possible to build a perfectly stable cube with a minimum of parts. The additional holes provide options for further strengthening the cube or to connect other parts to the cube.
The CAD model is available from Autodesk and GrabCAD.





Guide to LEGO ramp racing
Racing LEGO cars down a ramp is a popular attraction not only in the LEGOLAND Parks, but also at Brickshows and classrooms around the world. The physics around the race are well understood, but experiencing them in practice is a great learning experience for students.
We setup a little ramp race at home and I would like to share our setup and results with you. We put two base plates together as the ramp and inclined it at ten degrees. We then measured four meters from the starting point up the ramp to the finishing line.
Of course, you can race multiple cars at the same time but then you might encounter collisions and photo finishes too close to call. A reliable and precise measuring system is a much better solution. The SpeedClock App is just what you need. It allows you to measure the speed of a car with a smartphone. You can for example place the phone at the end of the ramp to measure the LEGO car’s maximum speed. You can also synchronize two phones running the app and measure between a start and finish gate. We tried both methods. All races were completed three times and the times and speeds reported are averages.
We started with a typical LEGO car (150gr) and it took it 4.42 seconds to complete the four meter distance. We then started to use my special Ramp Racer. It uses Mindsensor’s ball bearings, large wheels and a heavy battery pack (324gr). It’s maximum speed was 4.3 km/h and it took 3.4 seconds to complete the four meters distance. The same car without the batteries (148gr) had a maximum speed of 4.06 km/h and it took 4.2 seconds to complete the full track. Last we tested the Ramp Races with another set of wheels for which I also had rubber tires. With the rubber tires it took 3.7 seconds to complete the race and 3.6 seconds without.
In conclusion, the ball bearings make the car significantly faster and large hard wheels are best. The heavy batteries conserve the kinetic energy and result in a winning car. For a fair competition a maximum weight should be set. Since the ball bearings used were not from the LEGO company a policy on using third party parts is also advisable.